
介绍
- 为了能对提出的方法的性能进行定量的评估。本文采用了和2007年医学影像计算与计算机辅助介入国际会议(MICCAI)医学图像分割竞赛[21]相同的两个基于体积的度量指标体积重叠率(Dice Similarity Coefficient,Dice)和基于表面距离的度量指标平均对称表面距离(Average Symmetric Surface Distance,ASD)来对分割结果A与手动分割金标准B进行比较。其中体积重叠率(Dice)与平均对称表面距离(ASD)的定义如下:
- (1)体积重叠率(Dice Similarity Coefficient,Dice):在定义体积重叠率之前需要先定义分割结果A和金标准B的体积重叠率系数,也称Jaccard系数( Jaccard Index,JI )[22]:
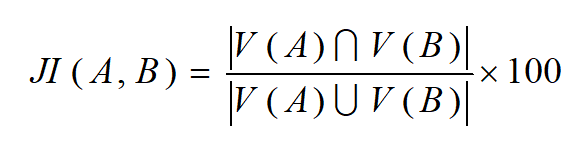
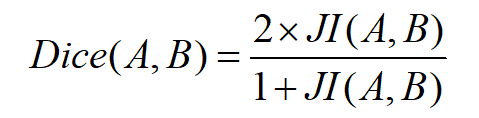
- 其中,V(A)表示分割结果A的体素集合、V(B)表示金标准B的体素集合。相应的,体积重叠率(Dice)就可以定义为:
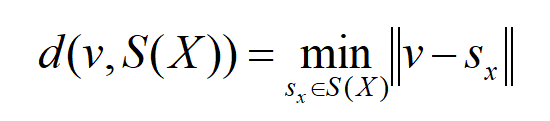
- (2)平均对称表面距离(Average Symmetric Surface Distance,ASD):它是基于表面距离的度量指标。定义为分割结果A的表面体素S(A)与金标准B的表面体素S(B)之间的平均距离:

- 其中,d(v,S(X))定义为体素V到分割结果X表面体素的最小欧式距离:
- 这两个基于体积的度量指标体积重叠率(Dice)和基于表面距离的度量指标平均对称表面距离(ASD)的单位分别为%和mm,对于体积重叠率(Dice)来说,值越大表示分割结果越精确,对于平均对称表面距离(ASD)来说,值越小说明分割结果越精确。
算法实现
计算体积重叠率的时候,先计算分割结果和金标准的非零体素的总个数volume1+volume2,再计算体素重叠的个数intersection,用intersection/(volume1+volume2)得到JI,再用Dice计算公式得到Dice。
部分代码如下:
// Tanimoto overlap metric
unsigned long volume1=0, volume2=0, intersection=0;
IteratorType resIt( resultImage, resRegion ), valIt( validationImage, valRegion );
for ( resIt.GoToBegin(), valIt.GoToBegin(); !resIt.IsAtEnd(); ++resIt, ++valIt ) {
if (resIt.Get()!=0) {
volume1++;
if (valIt.Get()!=0) {
volume2++;
intersection++;
}
}
else {
if (valIt.Get()!=0) volume2++;
}
}
double tanimotoVal = 100.0 * (double)(intersection) / ((double)(volume1+volume2-intersection));
double tanimotoError = 100.0 - tanimotoVal;
//求dice
double jiError = (100.0 - tanimotoError)/100.0;
double diceError = 2 * jiError/(1 + jiError) * 100;
计算平均对称表面距离ASD的时候,需要先计算分割结果和金标准元素在同一个坐标系里面的全球坐标,再利用ANNkd_tree类求平均表面对称距离。
部分代码如下:
ANNpointArray borderPts2 = annAllocPts( numBorderPts2, 3 );
numBorderPts2 = 0;
for ( it2.GoToBegin(); !it2.IsAtEnd(); ++it2 ) {
if (it2.Get() != 0) {
validationImage->TransformIndexToPhysicalPoint( it2.GetIndex(), pnt ); //将像素数组中的Index转换为物理空间中的坐标。
for (int d=0; d<3; d++) borderPts2[numBorderPts2][d] = pnt[d];
numBorderPts2++;
}
}
ANNkd_tree *borderTree2 = new ANNkd_tree( borderPts2, numBorderPts2, 3 );
ANNidxArray nnIdx = new ANNidx[1];
ANNdistArray dists = new ANNdist[1];
for(unsigned int idx1=0; idx1<numBorderPts1; idx1++) {
borderTree2->annkSearch( borderPts1[idx1], 1, nnIdx, dists);
avgSqrDistance += dists[0];
double d = sqrt( dists[0] ); //分割结果到金标准的最小欧式距离
avgDistance += d;
if (d>maxDistance) maxDistance = d;
}